AVENTOUR DRONE
2017 - 2018 (студенческий командный проект)
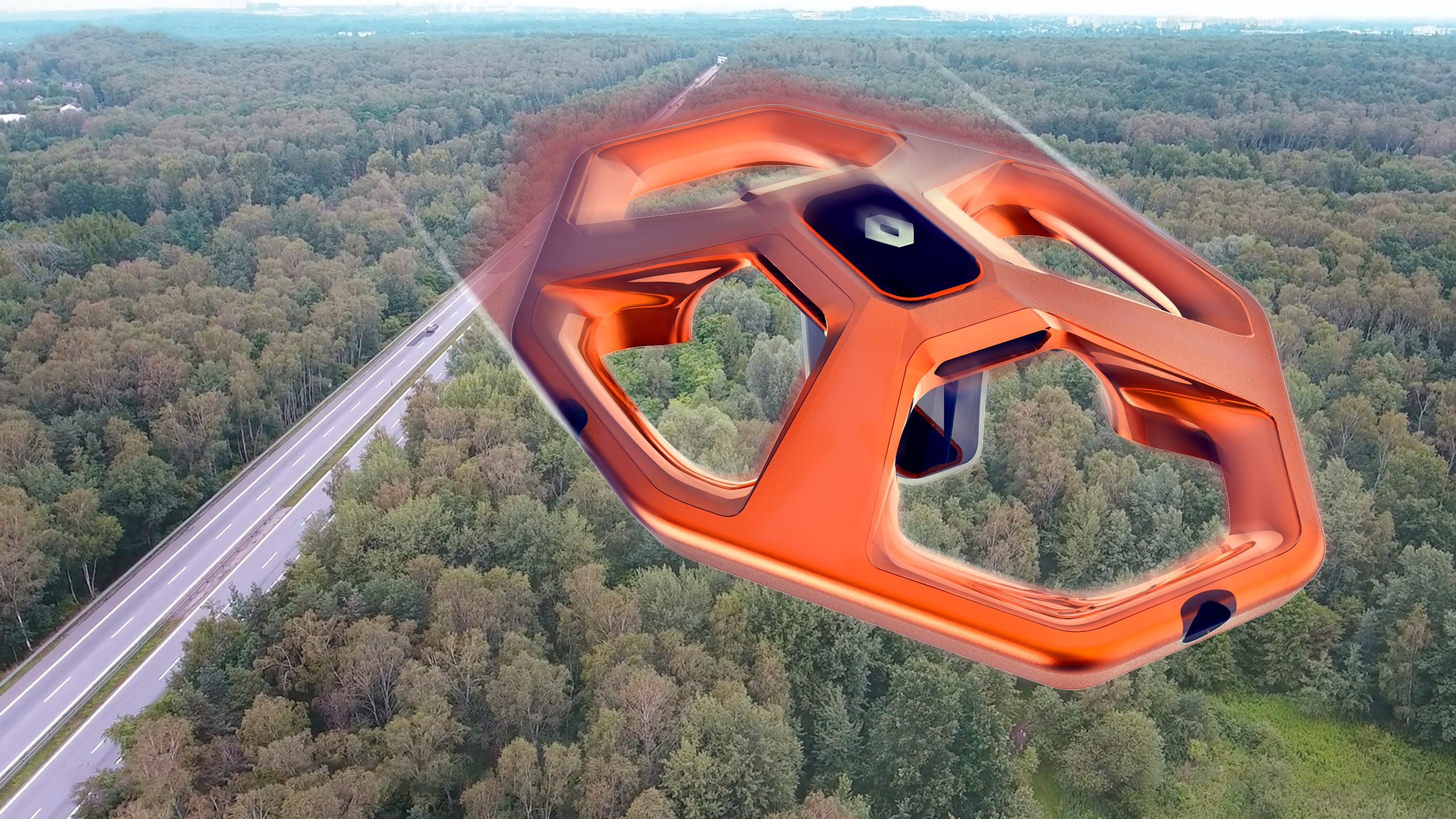
Исследовательский дрон для изучения, сканирования и диагностики дороги и труднодоступных неизученных мест на пути следования транспортного средства. Проект является частью системы автономного транспортного средства 4 уровня автоматизации. Разрабатывался в рамках конкурса "Future Autonomous Mobility For Russia 2035". Форма и стиль дрона вдохновлены концептами и формообразованием компании Renault, а силуэт основан на форме кристалла логотипа Renault. Дрон использует потоки воздуха низкого давления для взлета, полета и посадки.


Процесс проектирования
ДИЗАЙН-КОНЦЕПЦИЯ
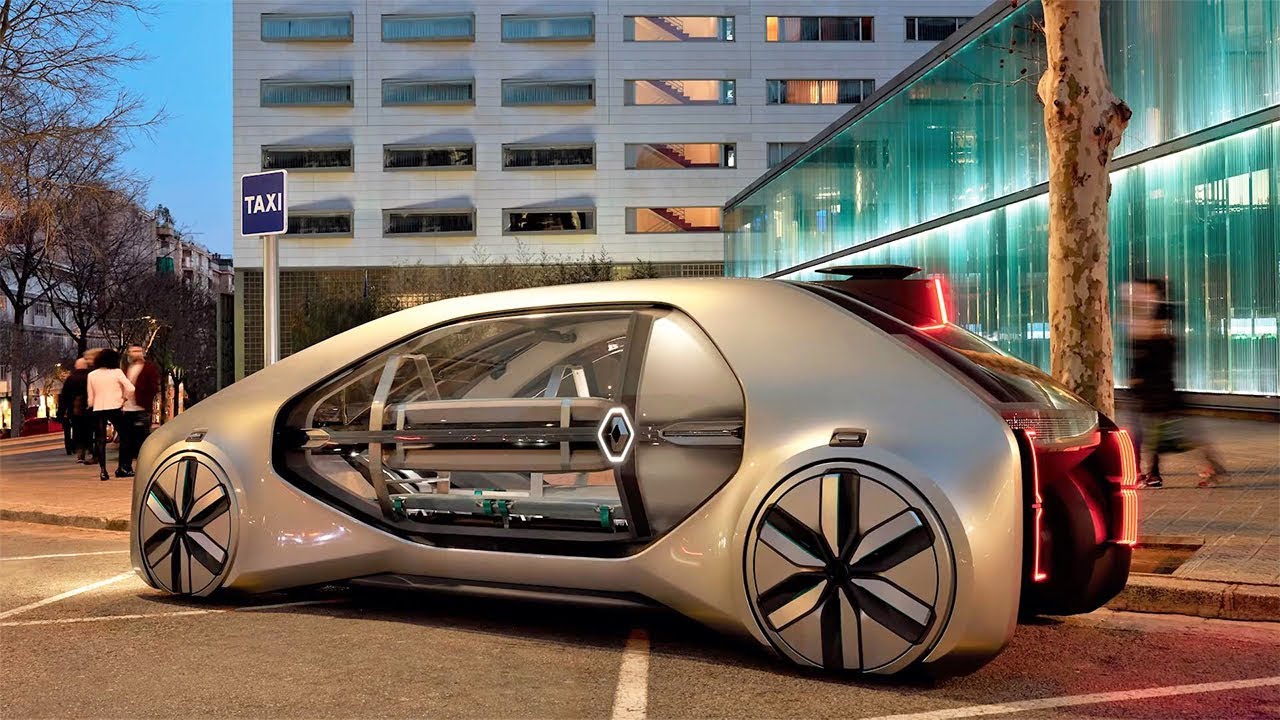
Создать концепт автоматизированной транспортной системы для междугородних поездок для большой компании.
В мегаполисах всех стран живут и работают люди, которые испытывают сложности в поездках на дальние дистанции. Города России расположены не так плотно, как в Европе, поэтому междугородние поездки непривлекательны для горожан. Но для поддержания ментального здоровья людям важно заниматься внутренним туризмом, посещать родных и совершать деловые поездки в другие города. В том числе, исследования показывают, что молодые люди не используют личный транспорт и не планируют (В том числе США, Европа и РФ). Поэтому наша команда поставила себе цель создать транспортное средство на основе системы автоматизированного каршеринга

Мы изучили путь пользователя по системе Job to be done и определили основные сложности, с которыми может столкнуться транспорт. Поэтому в систему транспортного средства было решено добавить автономный дрон на базе ИИ для коммуникации с пользователем и исследовательскими функциями. Мои старшие коллеги доверили мне заниматься разработкой этого дрона.
АНАЛИЗ И СБОР ИНФОРМАЦИИ
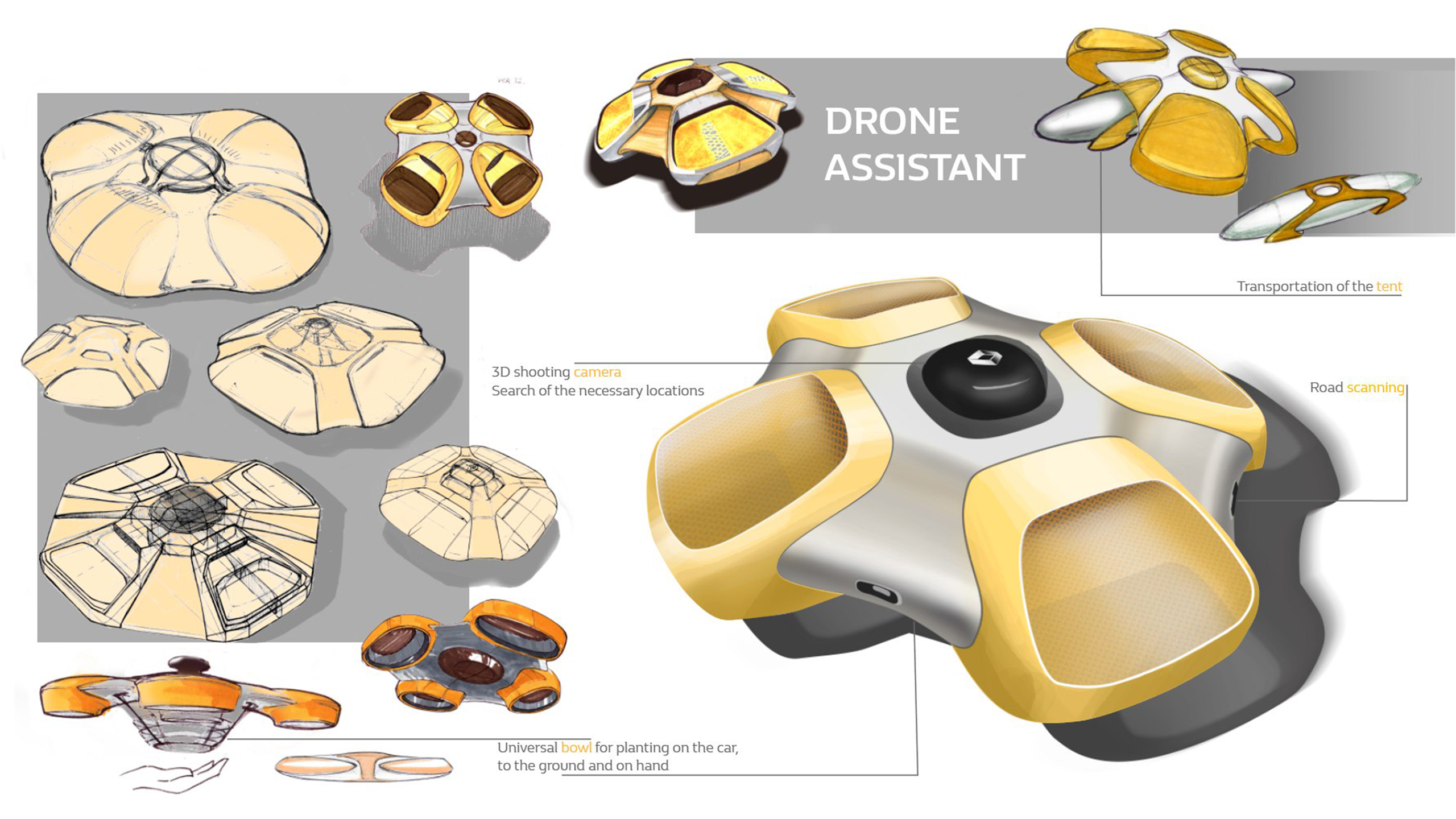
Основная задача дрона — это сбор данных, исследование местности, фотограмметрия и сканирование. Но также я предположил, что дрон должен стать связующим элементом между пользователем и автономным транспортом. Неким дружественным Искусственным Интеллектом, который будет реагировать на общение и упростить контакт с сложными технологиями.
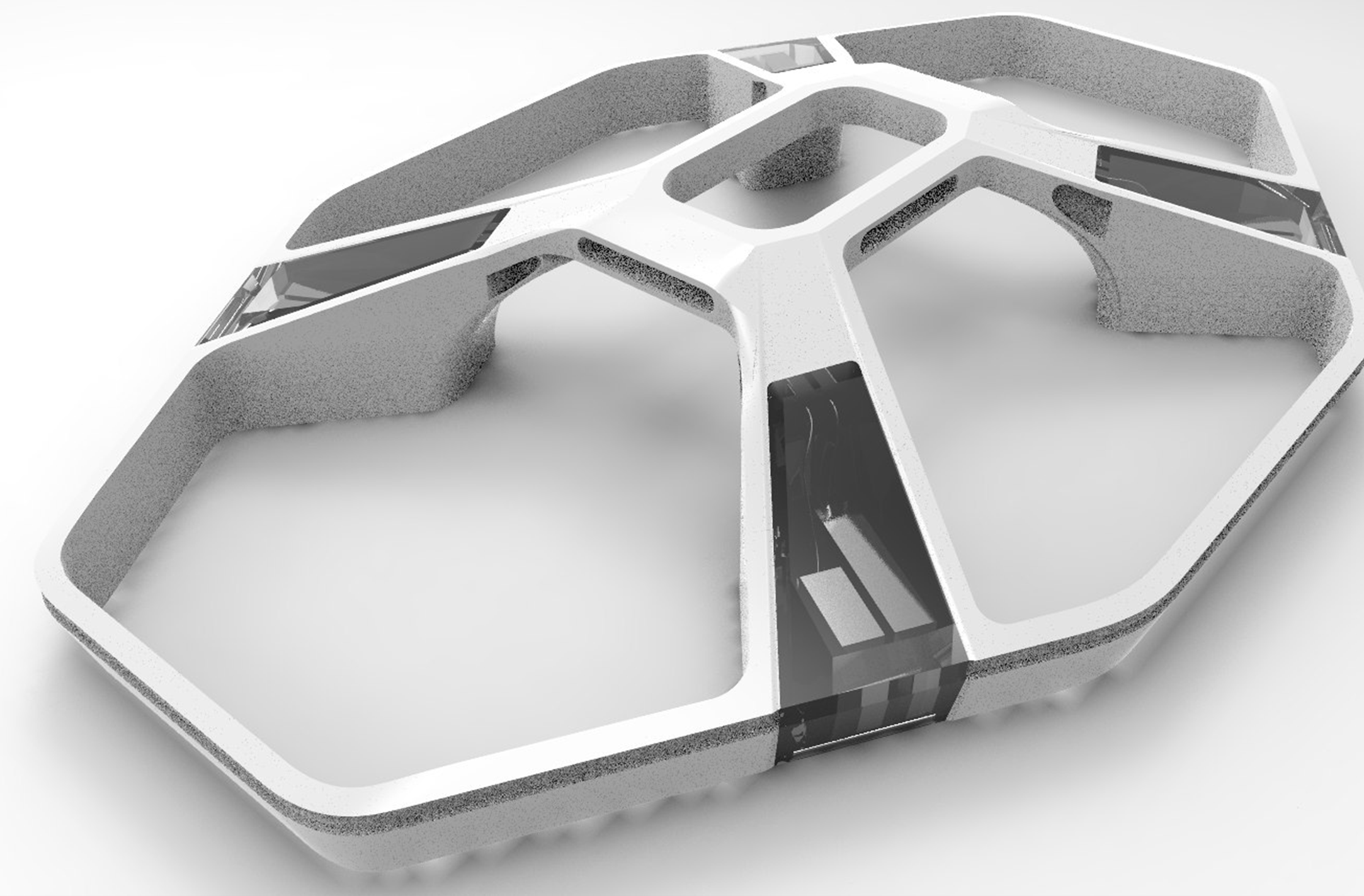
Поэтому я хотел сделать дрон наиболее безопасным и отказаться от лопастей, но сохранить вертикальный взлет и посадку. Изучив вентилятор Dyson и аэродинамические свойства, которые использовали инженеры, я предположил, что по теории экспоненциального развития технологий можно будет использовать такую же систему воздушных потоков уже для взлета дрона не тяжелее 5 кг.



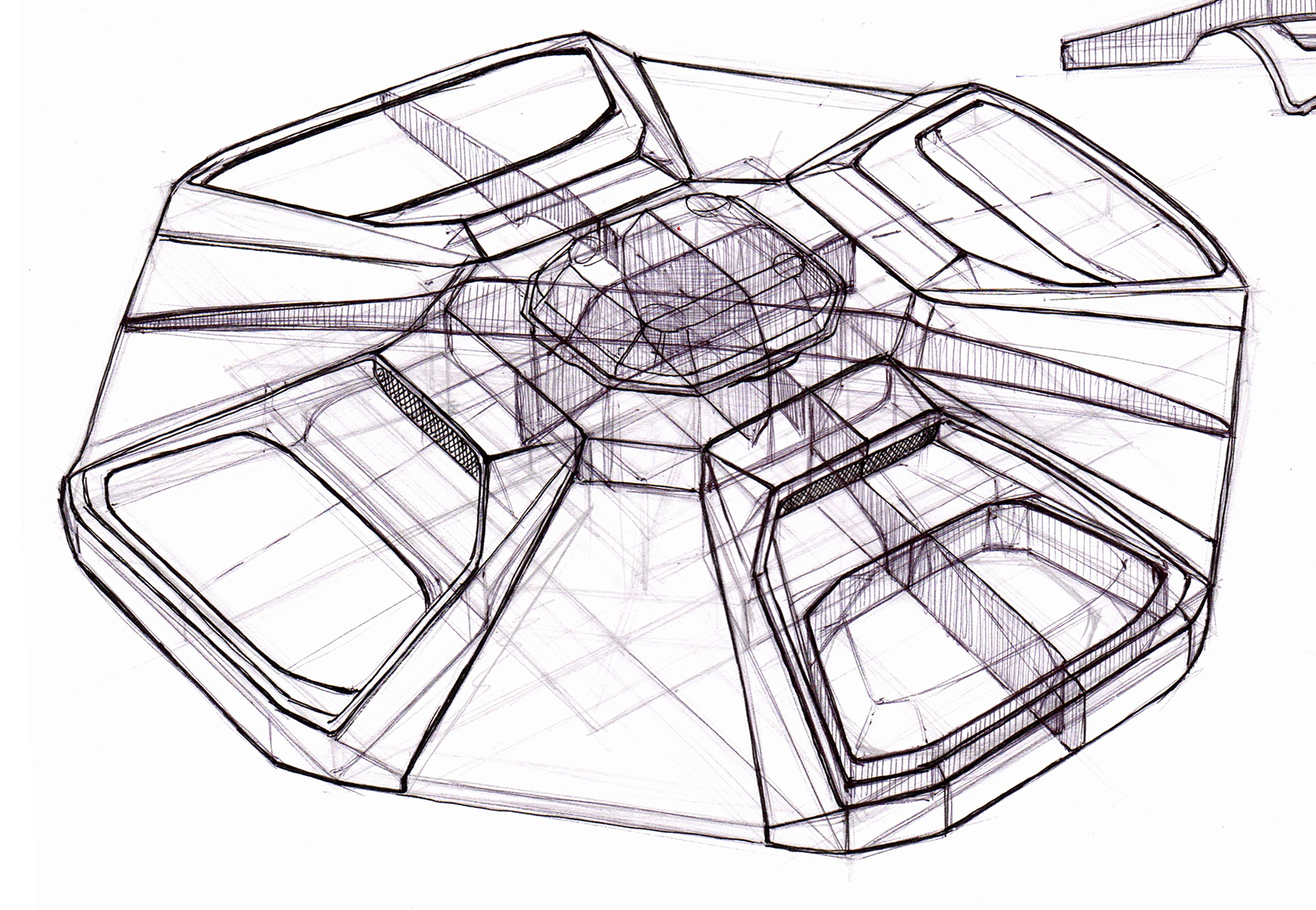
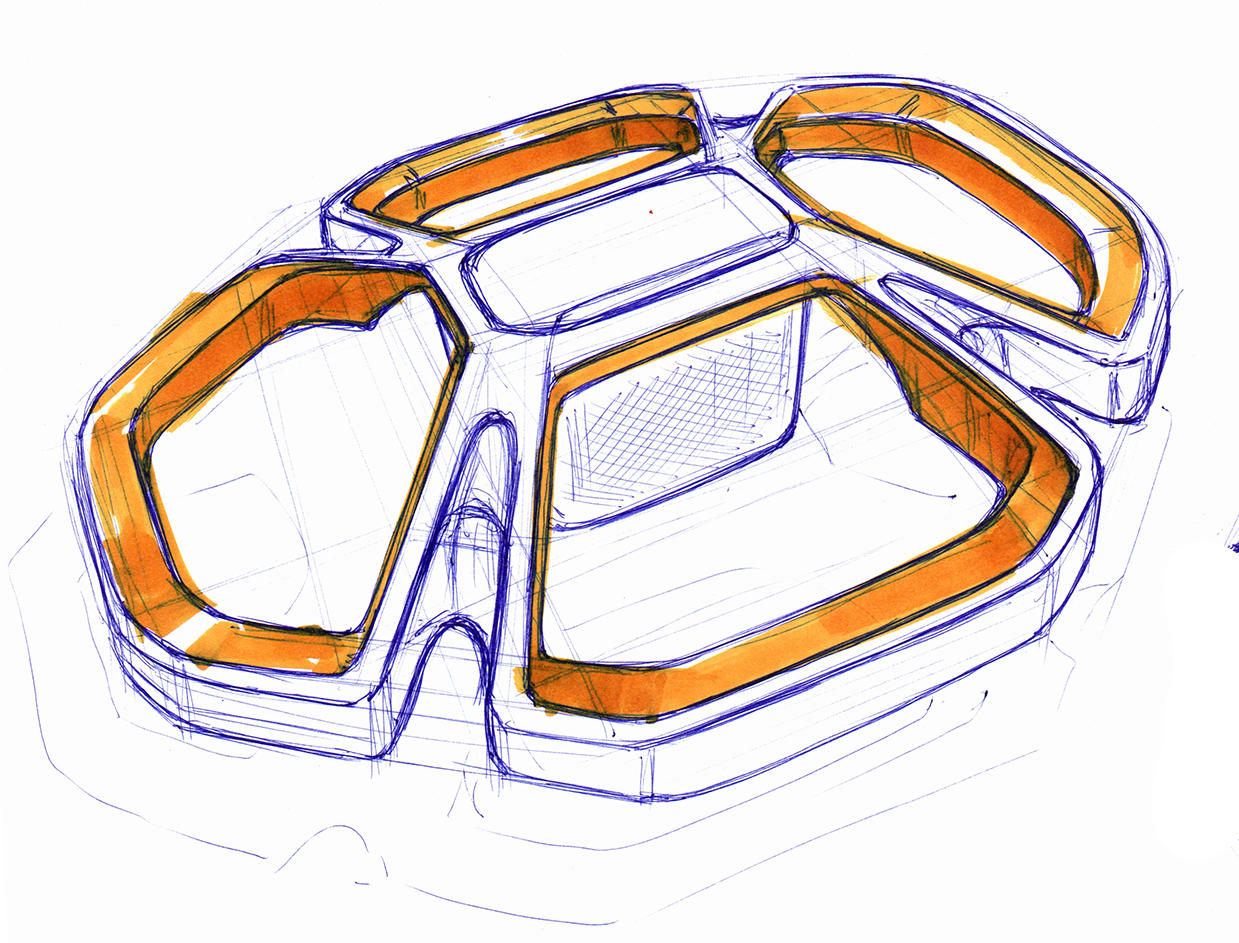
ЭСКИЗНЫЙ ПОИСК
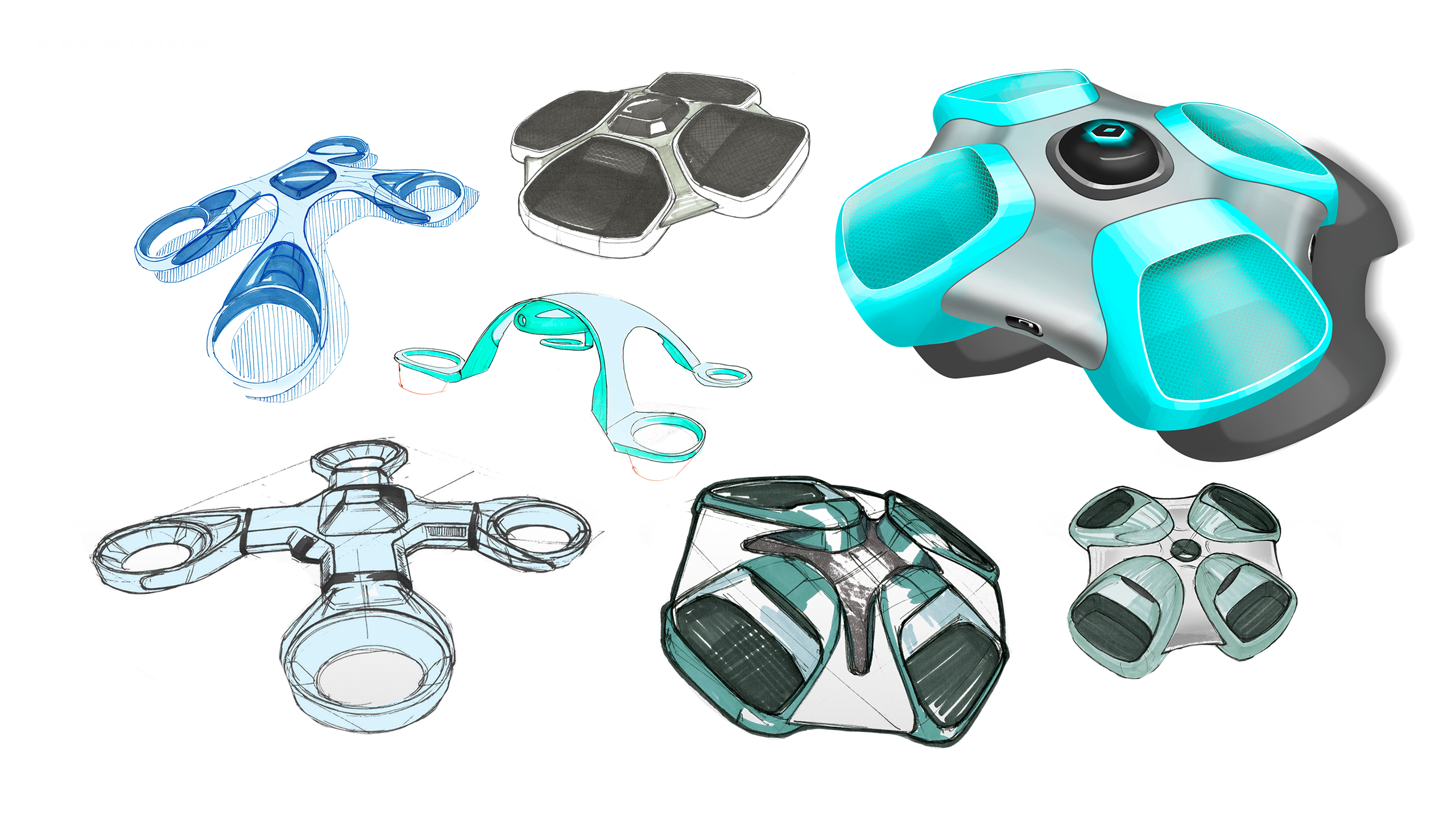
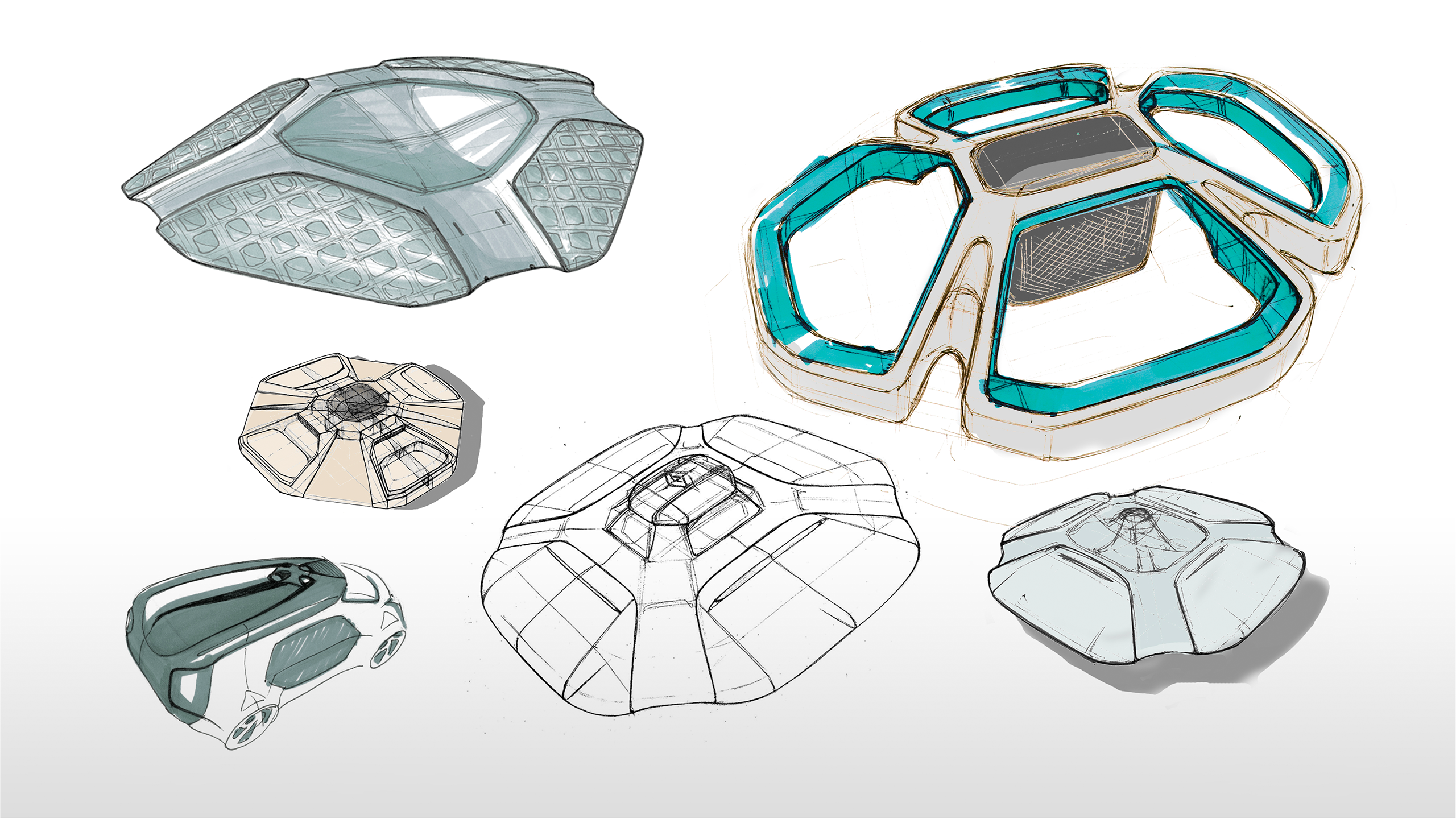
ПЕРВОНАЧАЛЬНЫЙ КОНЦЕПТ
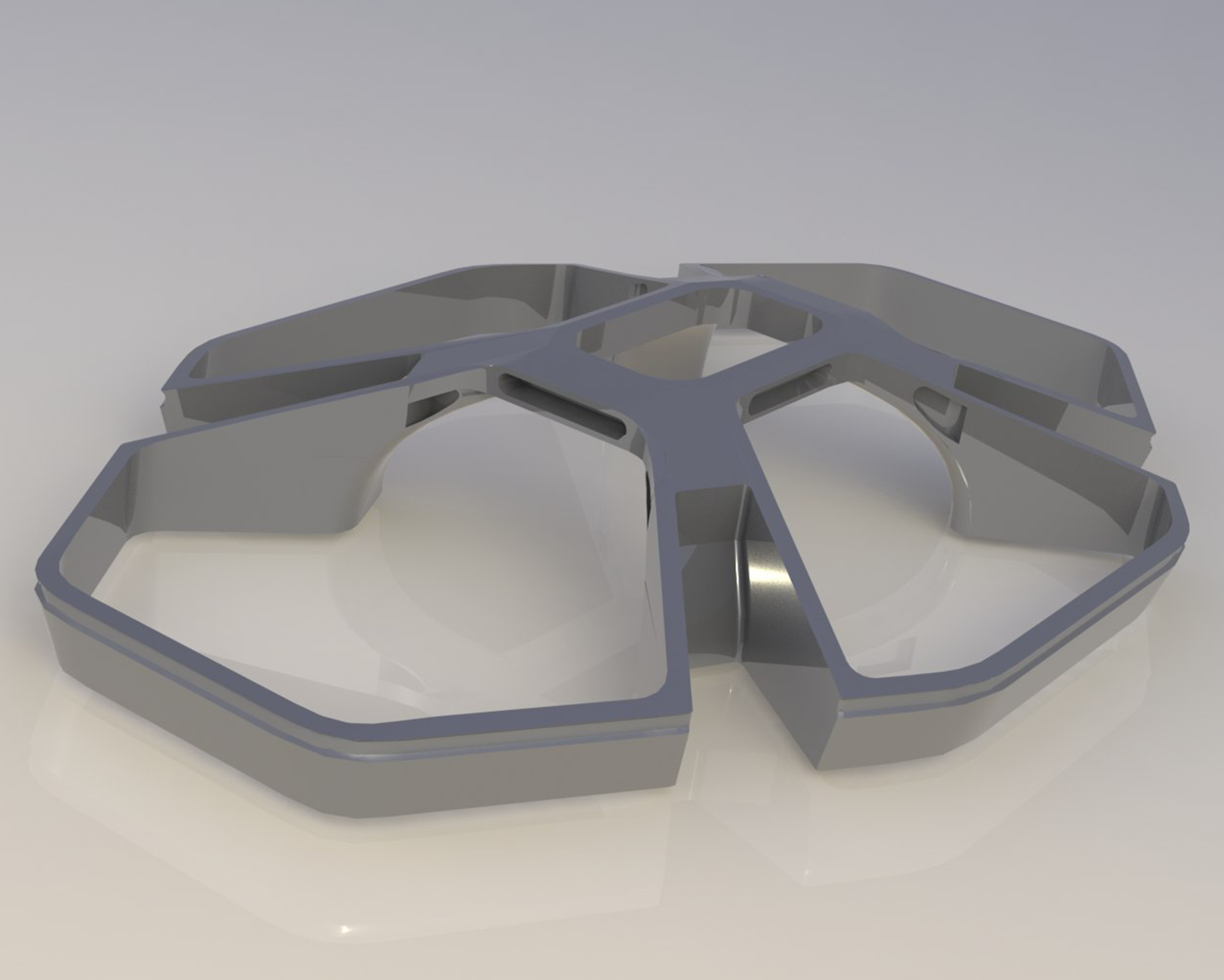
Первоначальная форма дрона была раздутой, пышной и тяжелой. Увидеть сверху такую рульку было страшно, поэтому я начал отсекать лишнее и очищать образ. Кольца воздушного потока стали больше и ушли от формы кольца, сохранив свою функцию. Пришлось пожертвовать ёмкостью аккумуляторов, из-за чего дрон стал менее автономным: время полета до 30 минут, отправка данных онлайн доступна только на дистанции до 100 м.
СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ
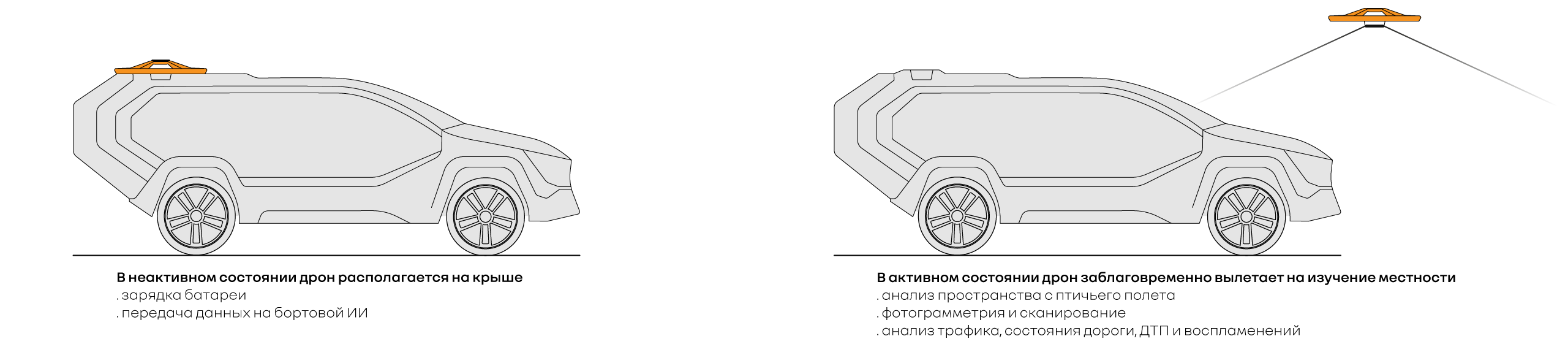
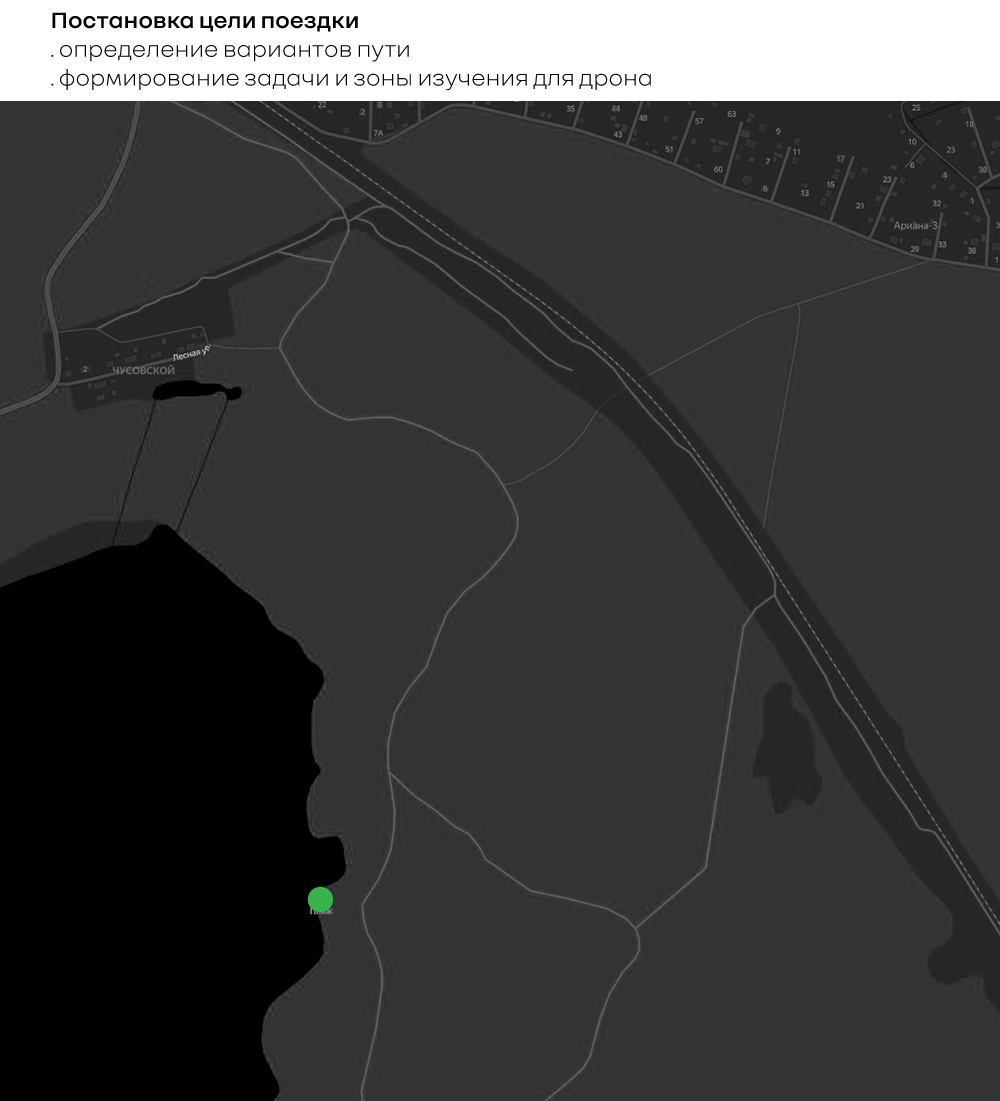
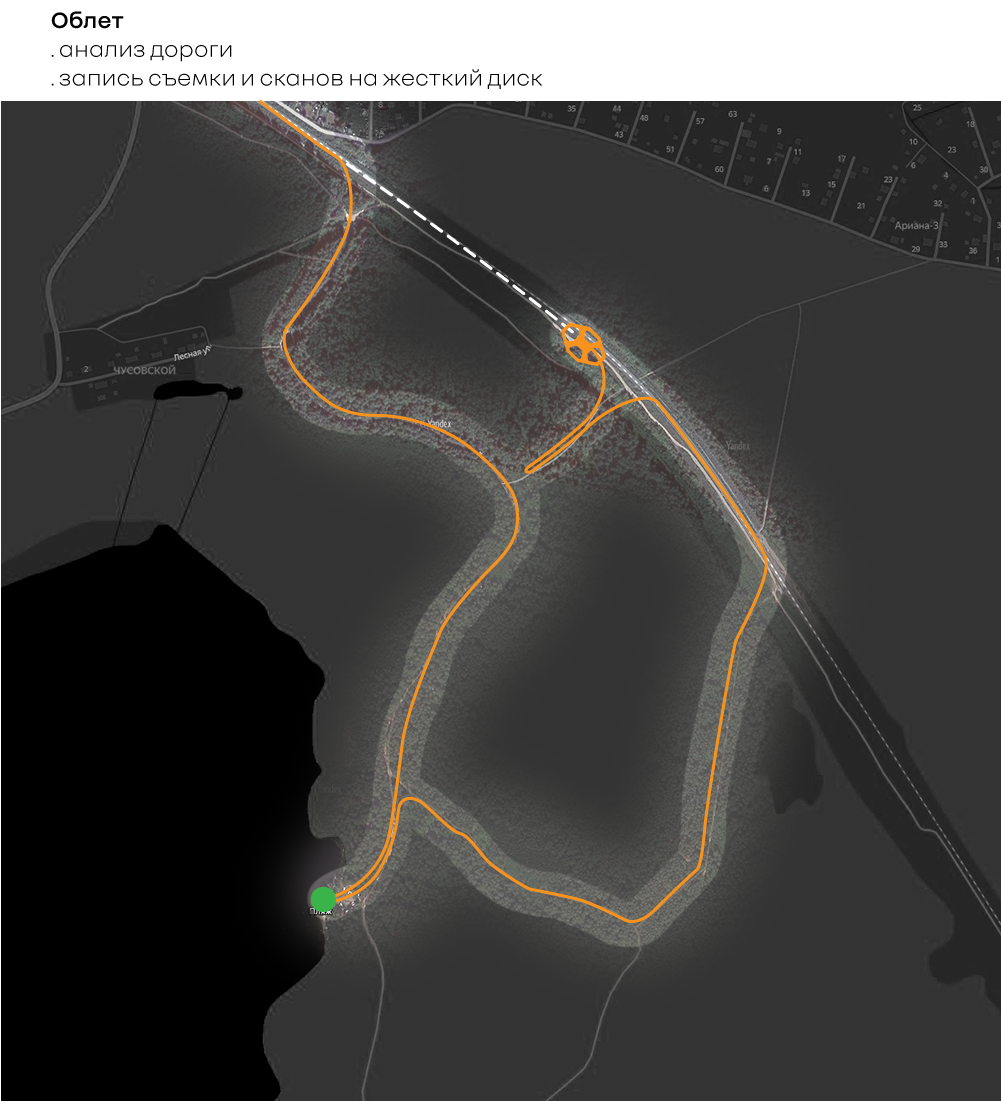
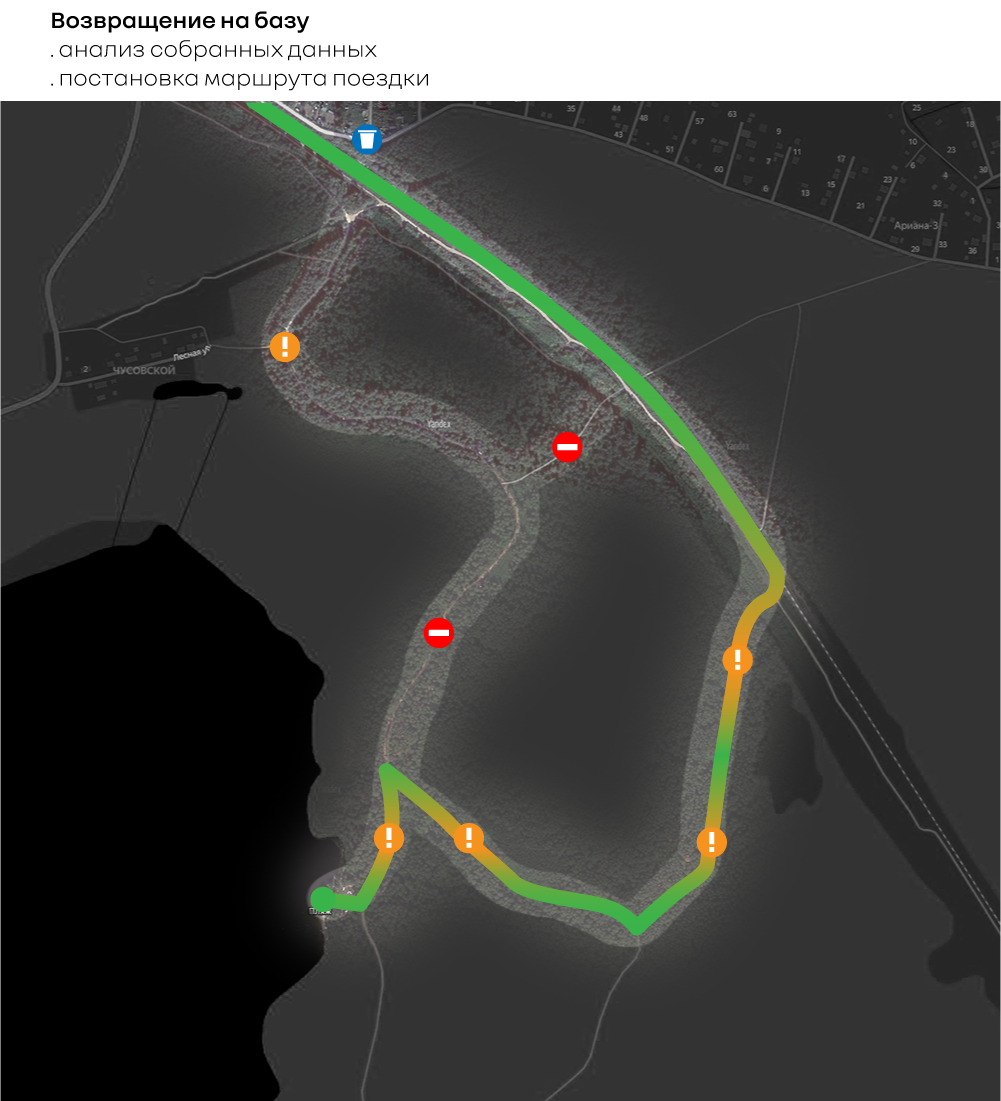
ИИ автомобиля определяет цель поездки и возможные пути следования. Исходя из этих данных формирует маршрут, по которому должен пролететь дрон и изучить состояние дороги. Дрон отправляется по маршруту, проводит сканирование, съемку и фотограмметрию. Формирует базу данных и возвращается на базу автомобиля для передачи данных и подзарядку. ИИ считывает информацию, анализирует и составляет оптимальный путь до поставленной цели
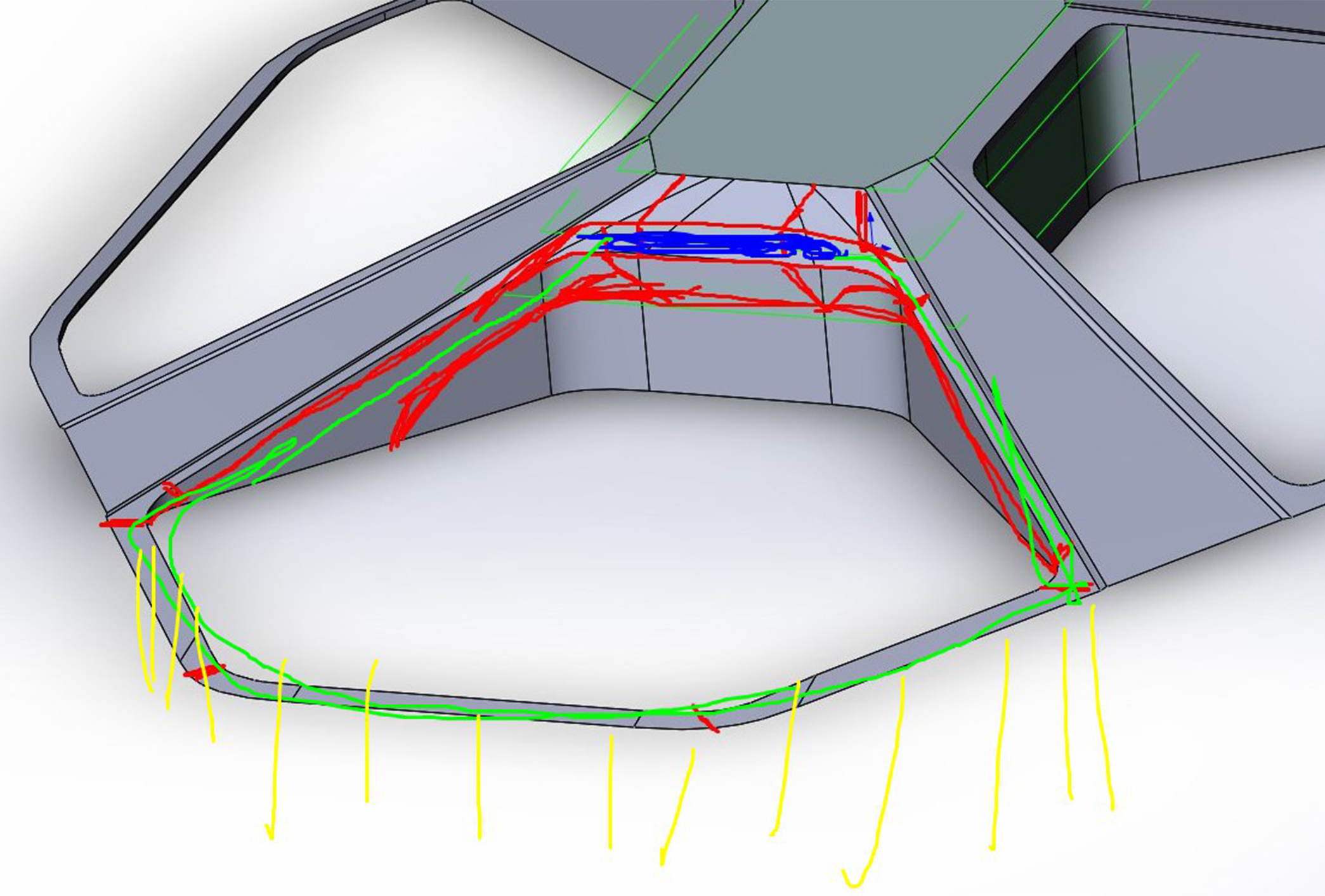
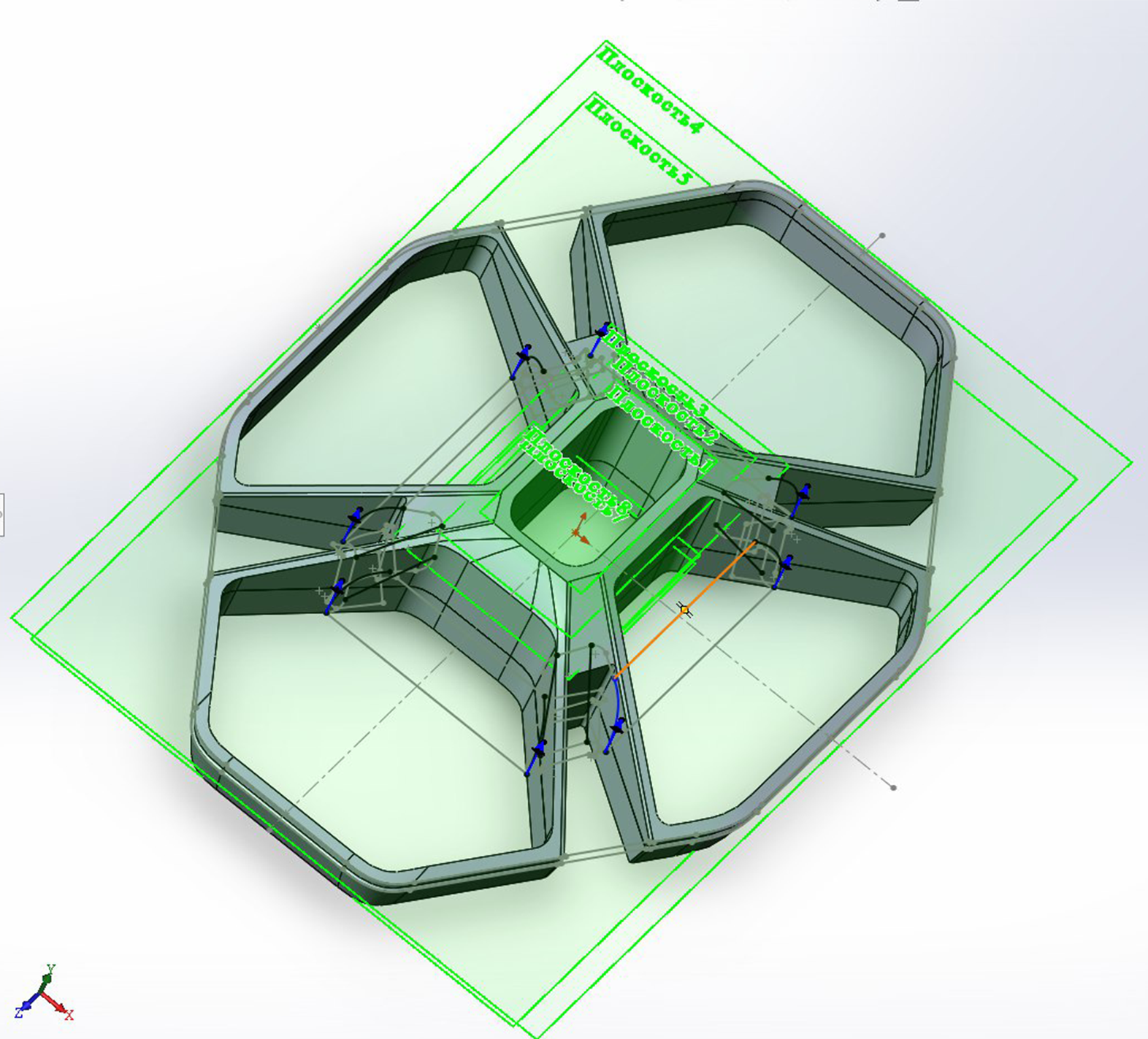
ОРТОГОНАЛЬНЫЕ ВИДЫ

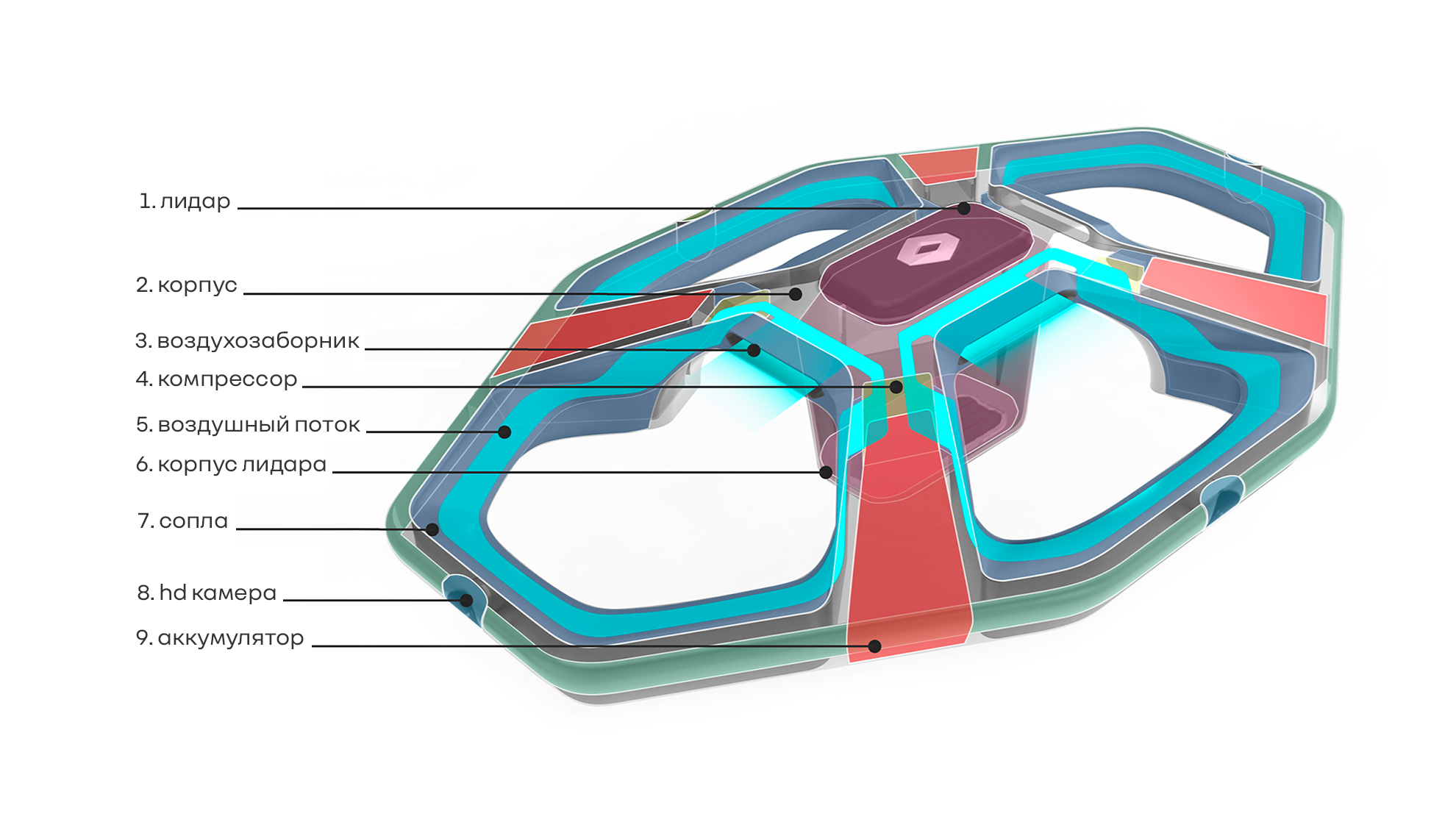
ЭКСПЛИКАЦИЯ
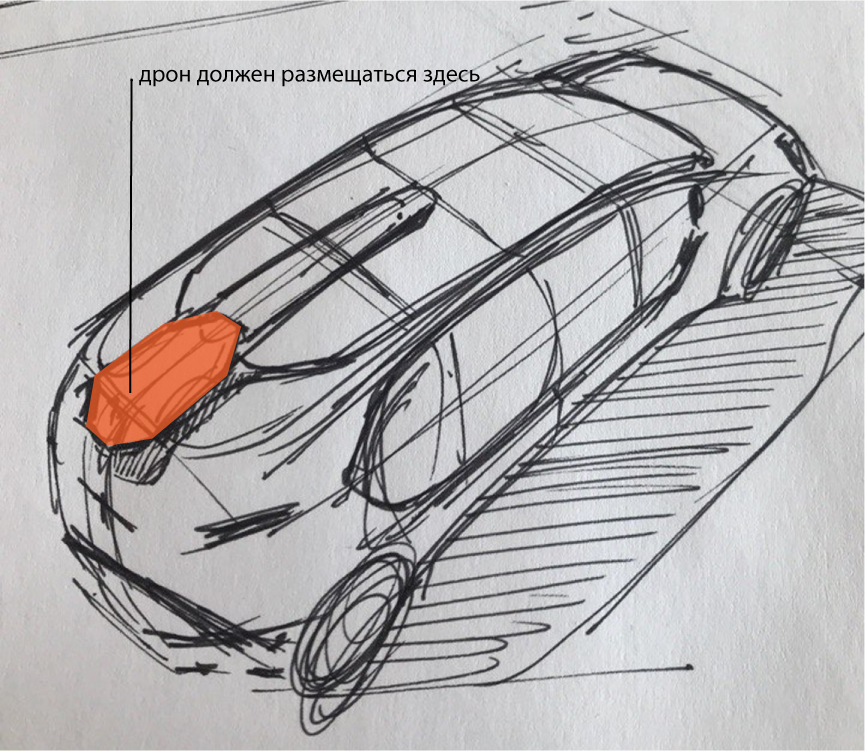
Несколько эскизов финальной концепции автомобиля и расположение дрона на нем
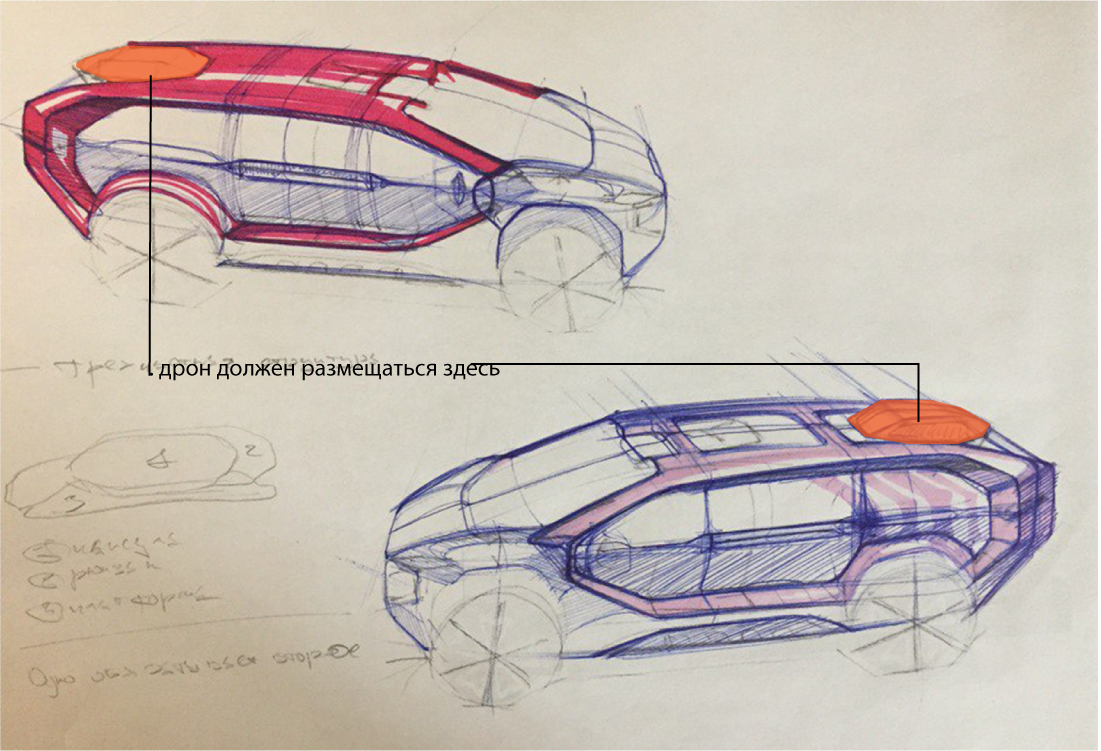
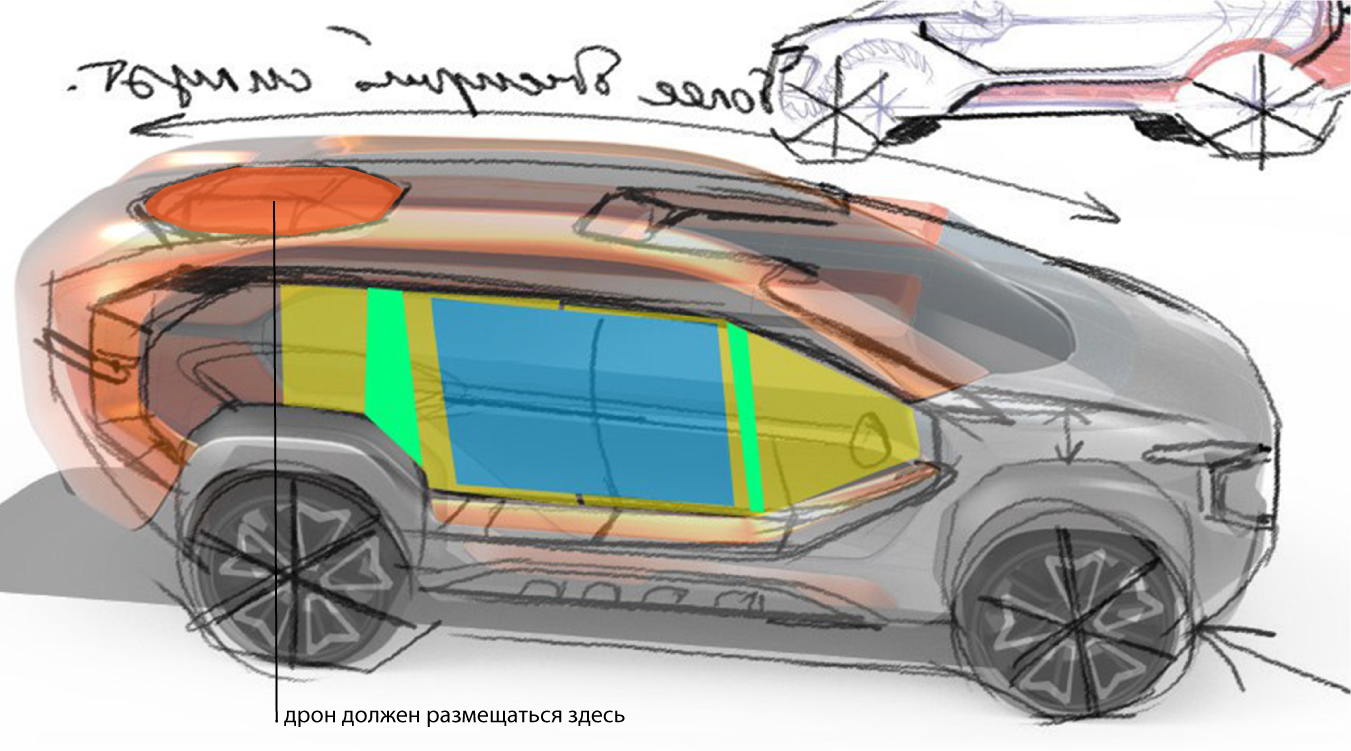
Эскизы Антона Балакина
ПРЕЗЕНТАЦИЯ ПРОЕКТА
Проекты команды были продемонстрированы профессорам университета, Энтони Грейду (В 2018 - Вице-президент отделения Design-Renault в Евразии) и Андрею Басманову (В 2018 - Senior дизайнер концепта Renault EZ-GO). Работа отмечена экспертами, как интересный взгляд на развитие дизайна и технологии. В итоге, я получил отличные советы и наставления экспертов, получил опыт командной работы и мотивацию изучать и улучшать свои профессиональные навыки.



Спасибо за внимание
Денис Плеханов
prom@dendiz.ru