Идея проекта родилась из давнего желания заанимировать сложную механику — изначально я думал о роботе. В этот же момент появилась практическая цель — создание демоверсии интерактивного VR-тренажера.
Подготовку технической базы взял на себя мой коллега программист. Он настроил работу шлема и интегрировал PICO Unity Integration SDK, что позволило мне полностью сосредоточиться на создании контента, сборке приложения и настройке всех механик тренажера.
Вдохновение пришло из прошлых задач. Изучая базу референсов автопарка для разработки дизайна наклеек на спецтехнику, я зацепился за старый ГАЗ-3308. Его манипулятор оказался удивительно похож одновременно на роботизированную «лапу-растяпу» Тони Старка и на руки ВАЛЛ-И, а круглые фары напоминали глаза-линзы. Да и функциональная цель у них одна — сбор отходов в оранжевый кузов-контейнер. Казалось, будто аниматоры Pixar вдохновлялись именно этим грузовиком!



Наличие готовых чертежей и фотореференсов из старых проектов идеально замкнуло круг. Для меня эта работа превратилась в своеобразный мета-фреймворк 4R:
Reuse (повторное использование) — применение старых наработок и базы референсов.
Recover (восстановление) — воссоздание машины по оригинальным чертежам.
Recycle (переработка) — трансформация классической техники в новое интерактивное цифровое воплощение.
Reduce (сокращение) — жесткая оптимизация ассета для плавной работы в VR-среде.
Ключевые задачи проекта
Создать достоверную hard-surface модель грузовика с учетом внутренней механики.
Настроить сложный риг манипулятора.
Подготовить кинематографичный рендер для демонстрации работы механизмов.
Перенести модель в игровой движок и настроить интерактив для VR-контроллеров.
Инструментарий
Blender / Unity / Photoshop / After Effects / PICO Unity Integration SDK / Visual Studio / C#
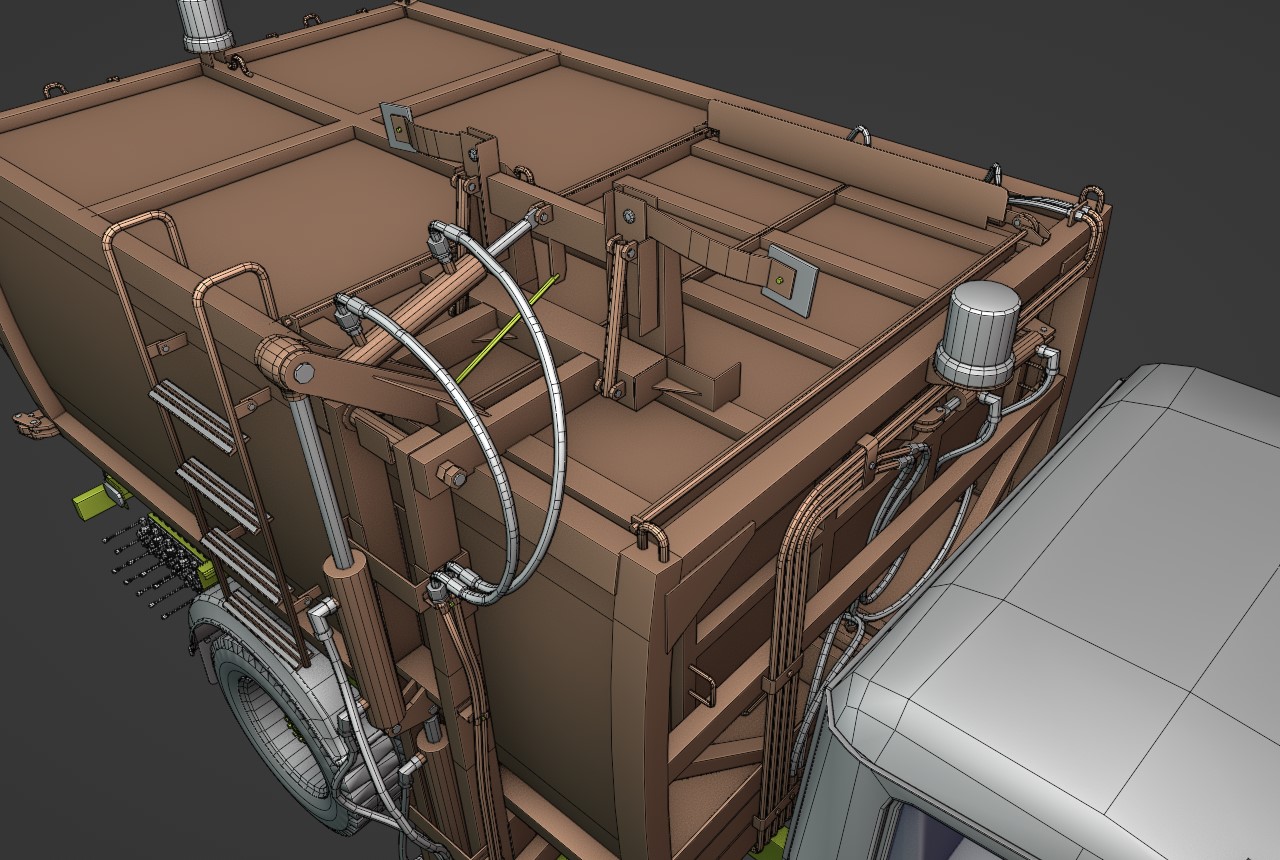
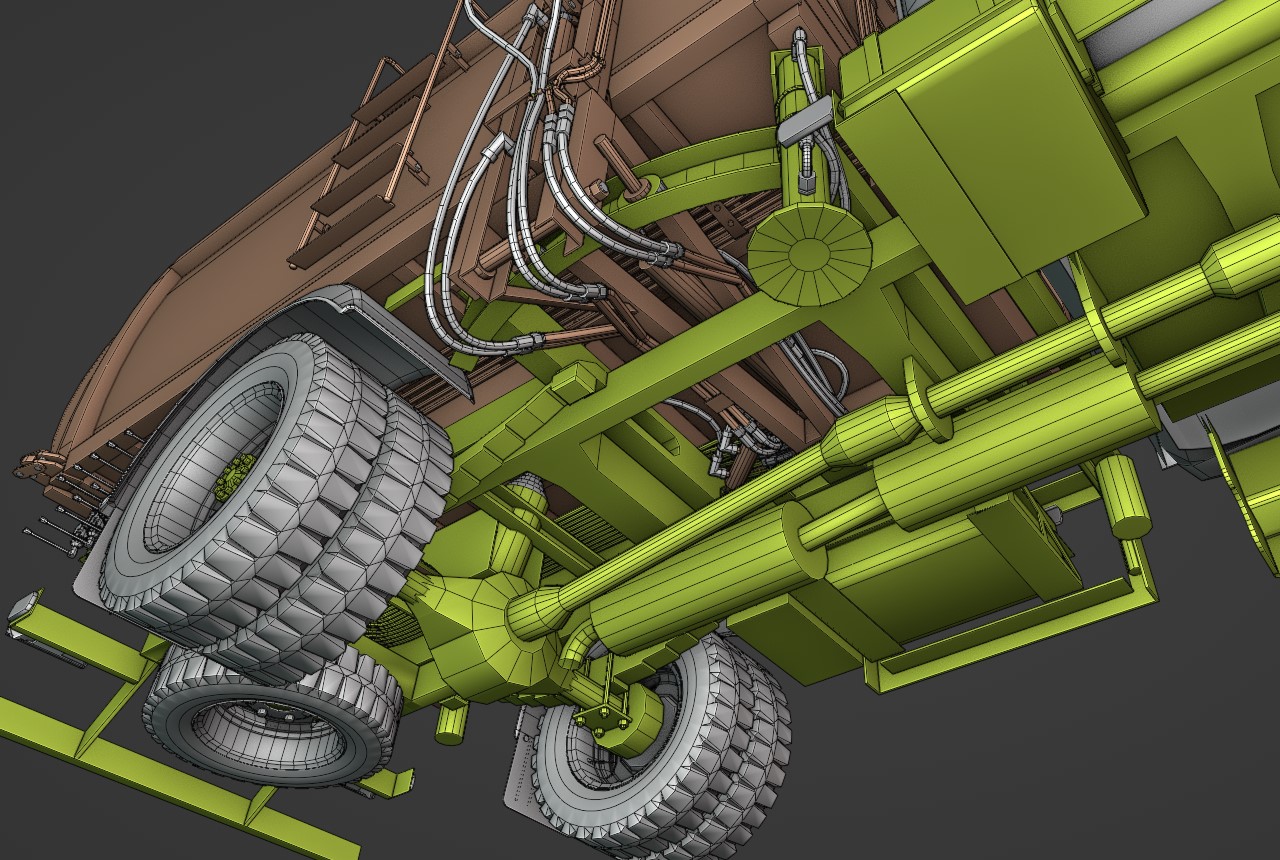
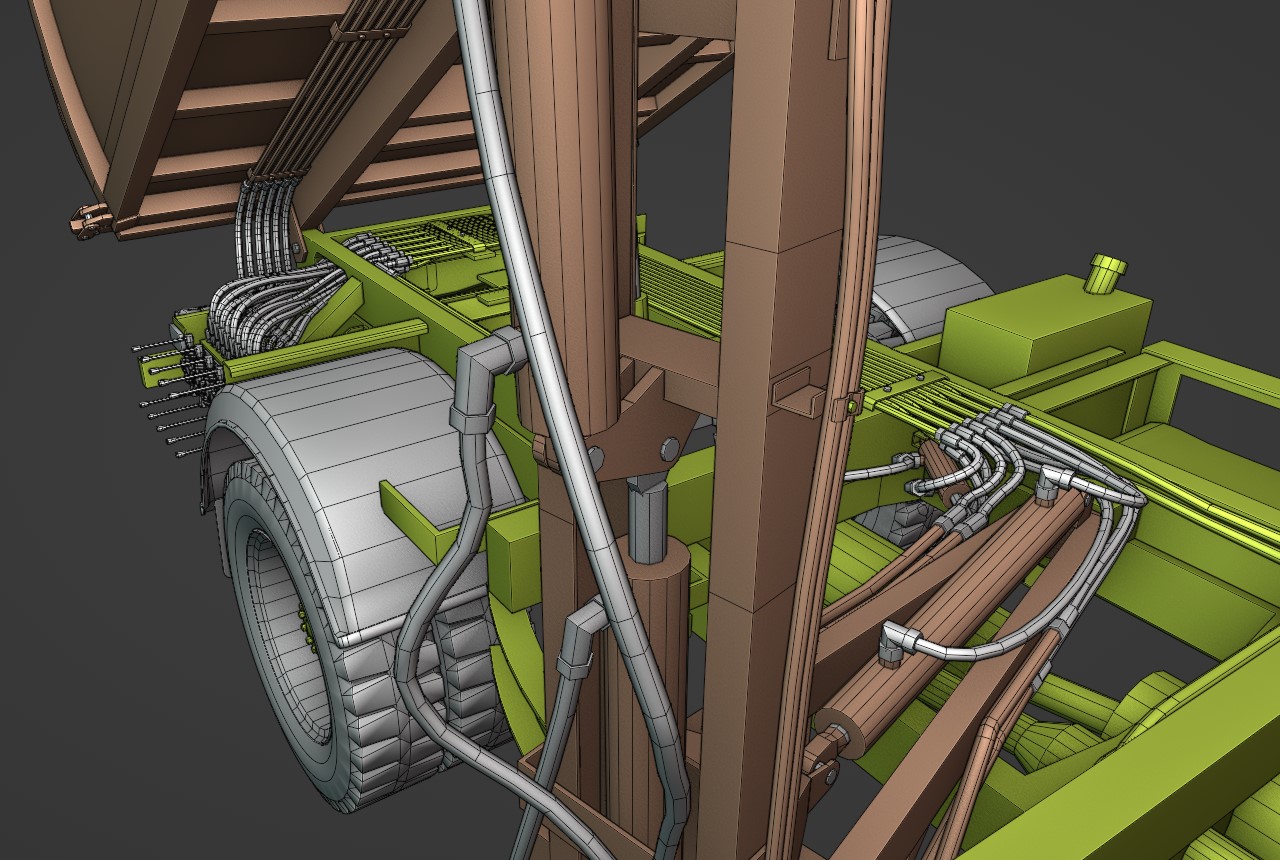
Топология и механика рига
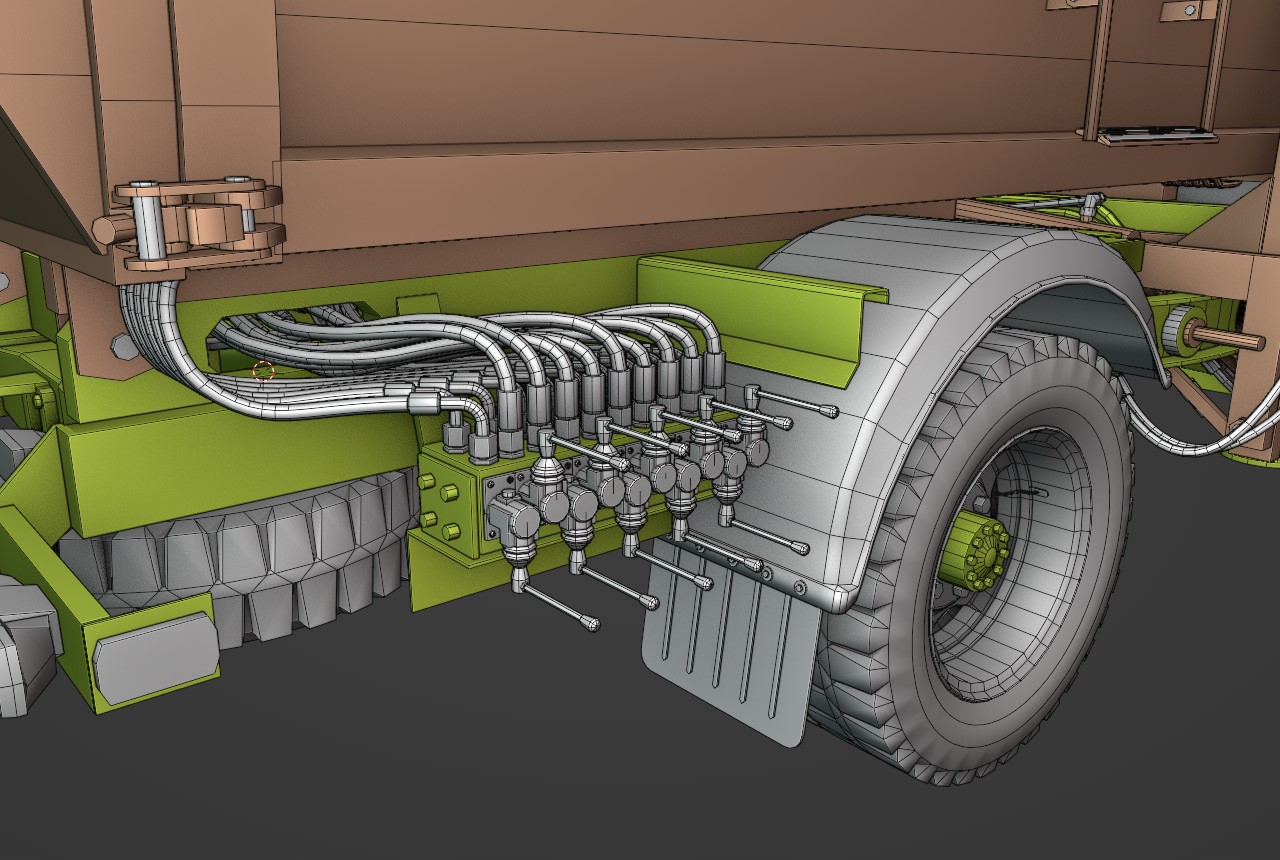
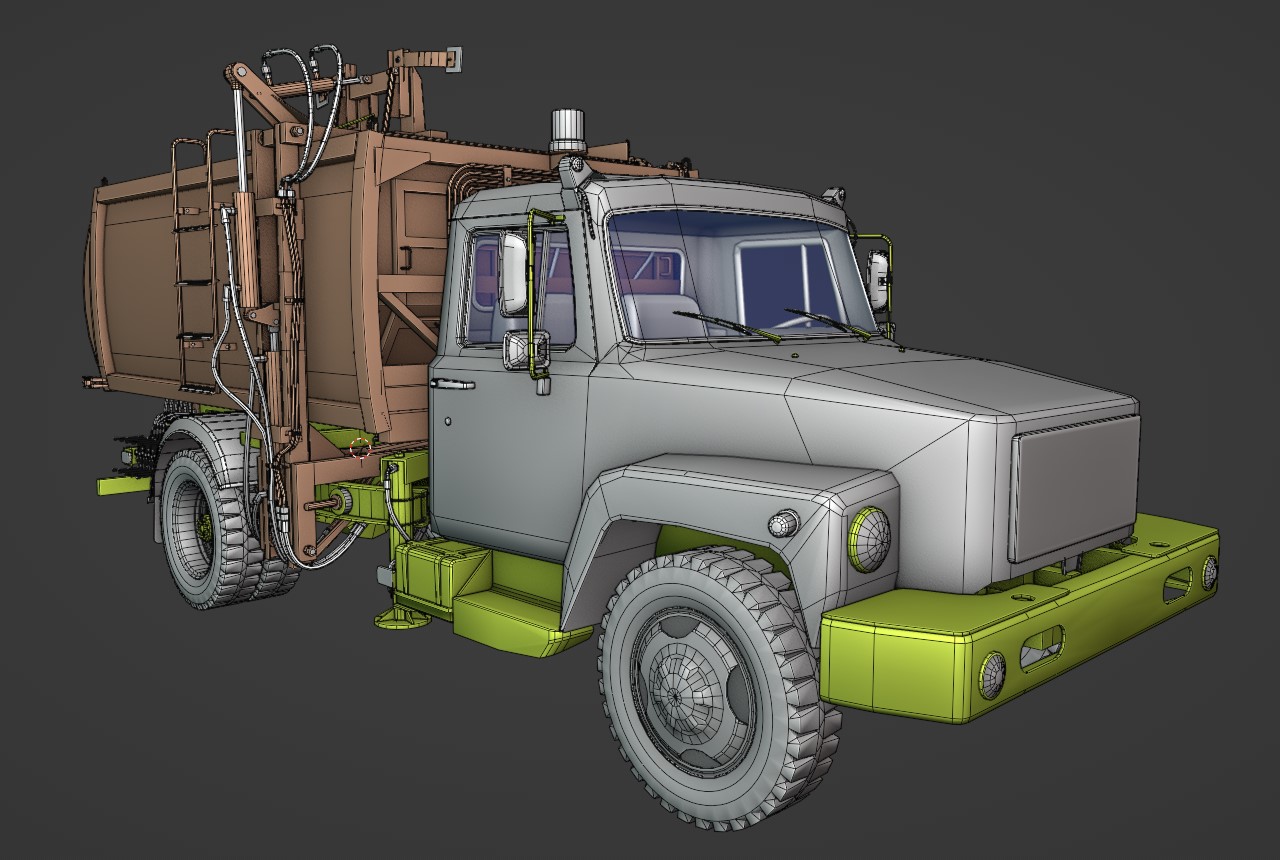
Для VR-проектов критически важна производительность, поэтому перед настройкой анимации я проработал геометрию. Главная задача на этом этапе — сохранить визуальную достоверность сложных механизмов грузовика, не перегружая игровой движок. На скриншотах сетки видно, как распределена детализация. Основной полигональный бюджет ушел на подвижные элементы, с которыми взаимодействует пользователь.
Небольшой дисклеймер по сетке — из-за артефактов отображения во вьюпорте на скриншотах «съелась» часть ребер

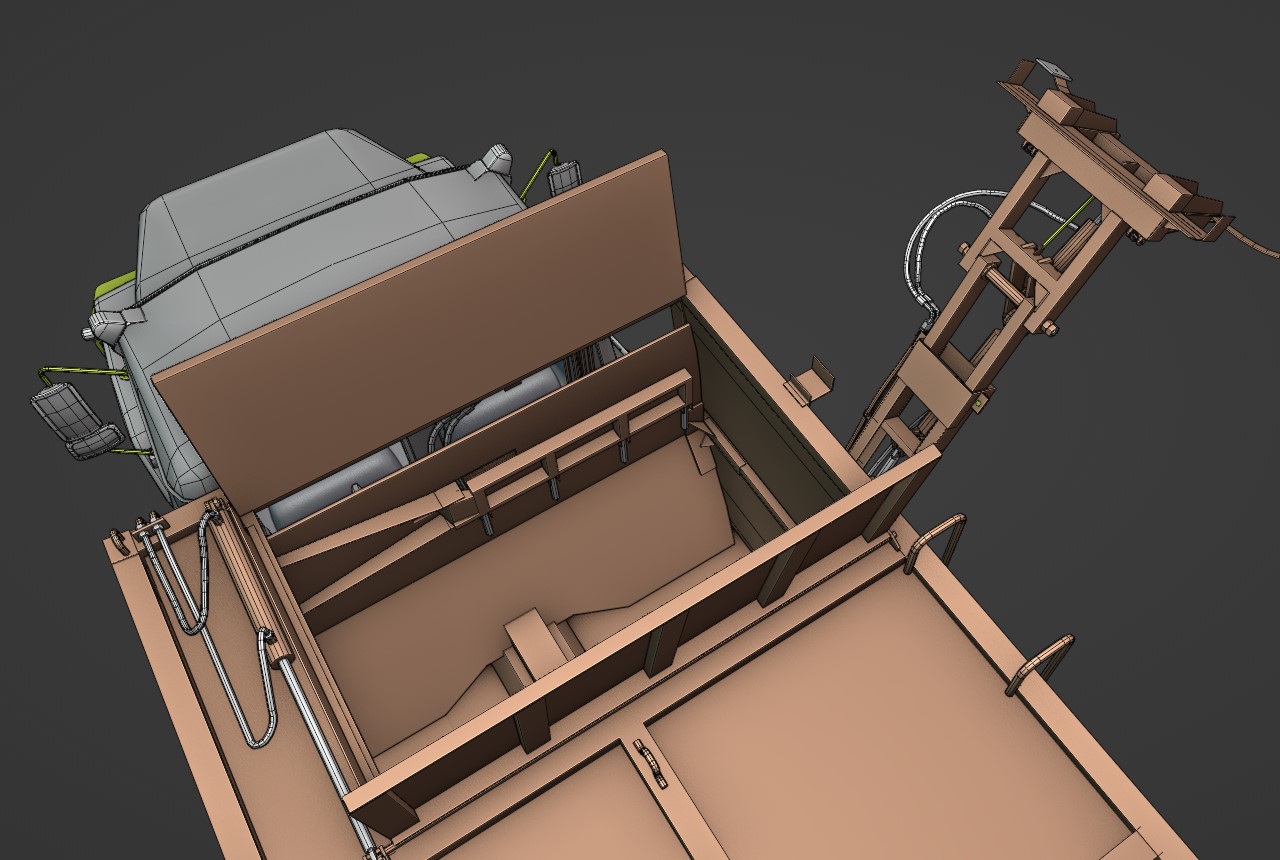
При создании рига я отталкивался от сценариев самого тренажера. Поскольку сложная симуляция поведения подвески не требуется для текущих задач симуляции, я намеренно отказался от её настройки в пользу оптимизации. Также была исключена детальная проработка кабины и подкапотного пространства. Все внимание было сфокусировано на главном рабочем инструменте — манипуляторе.
Основа моего сетапа — это реалистичная работа гидравлической системы. Риг включает в себя следующие элементы:
• Настройка кинематики стрелы и захвата
• Точное скольжение и вращение гидравлических поршней вслед за движением конструкции.
• Динамическое поведение гибких гидравлических шлангов, которые корректно изгибаются и не пересекают геометрию при любых углах поворота манипулятора.
Такой подход позволил добиться максимальной реалистичности именно там, куда направлено внимание игрока в VR.
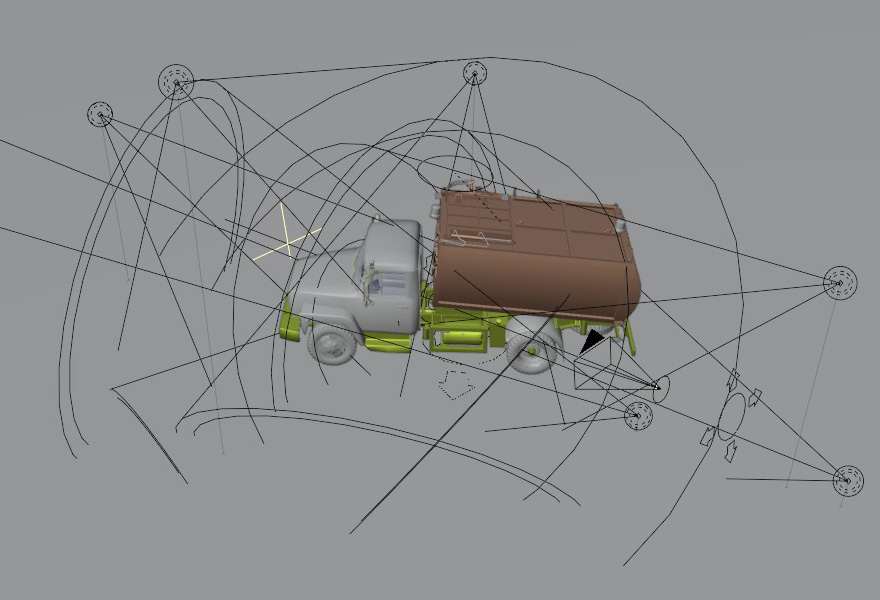
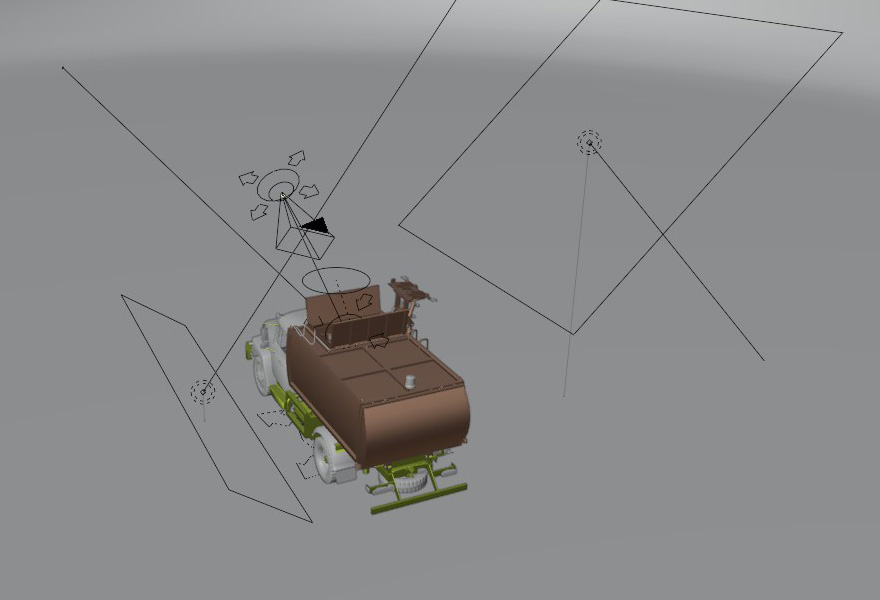
Настройка рига в Blender:

Тесты рига в Unity:
Кроме скриптов управления манипуляторами написал еще и несколько скриптов, оптимизирующих некоторые рутинные операции подготовки.
Управление камерой и Dolly Rig
Для создания плавных кинематографичных пролетов вокруг ГАЗ 3308 я отказался от стандартных кривых траекторий. Вместо этого использовался Dolly Camera Rig в Blender. Этот сетап позволил точно контролировать фокусное расстояние, отслеживание цели и плавность вращения вокруг массивного грузовика, избегая резких рывков при смене ракурсов.
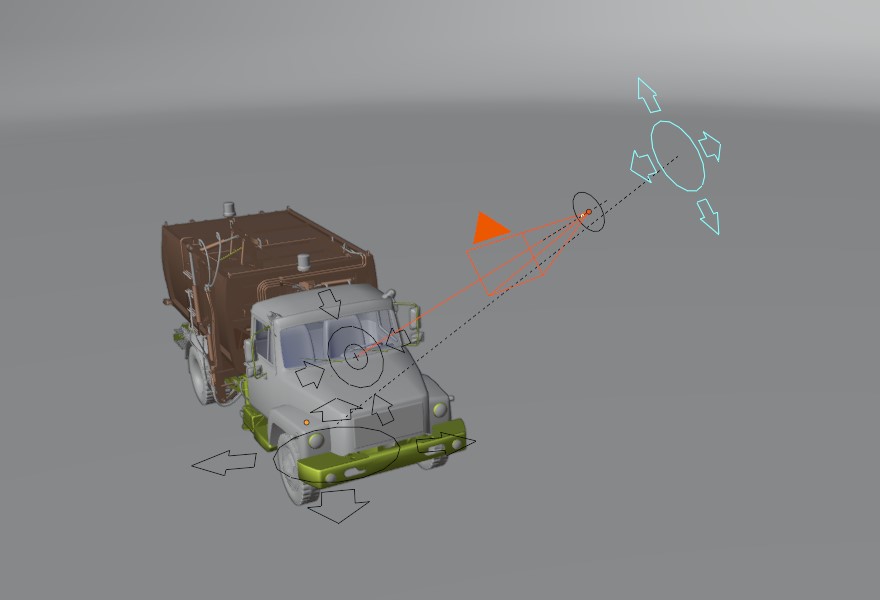
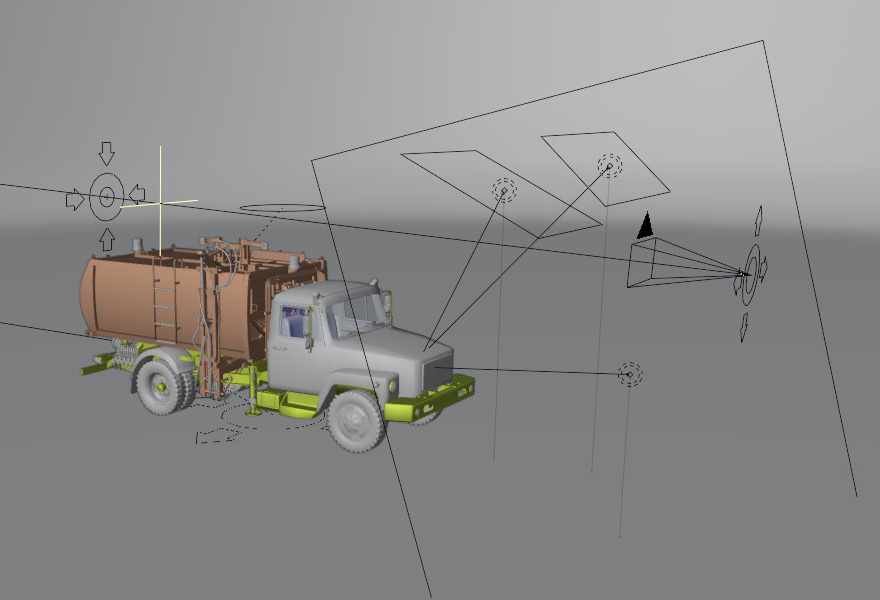
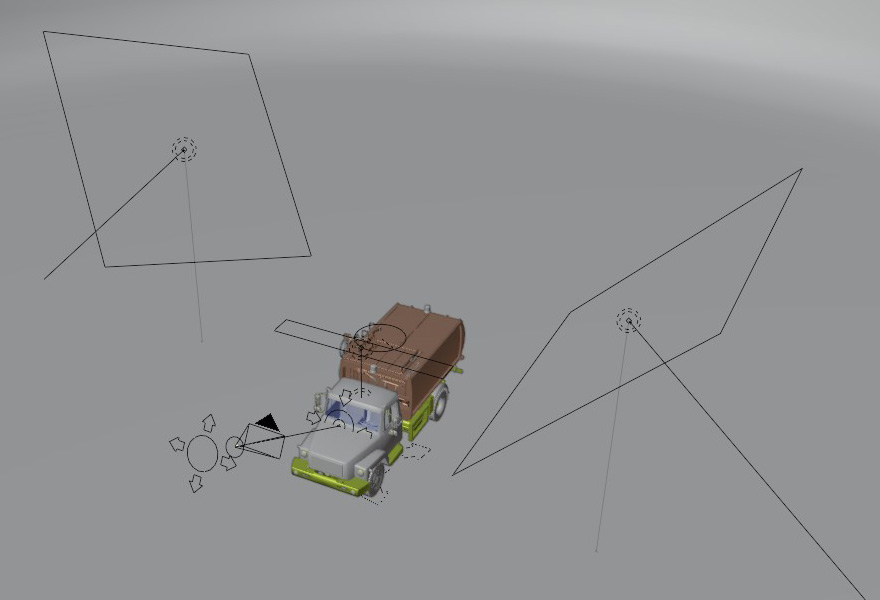
Схема освещения
Освещение в ролике динамическое. Чтобы подчеркнуть геометрию кабины и кузова, для каждого шота настраивалась индивидуальная схема света. Светильники были разбиты по коллекциям в Outliner, и их видимость переключалась синхронно с переходами между камерами. Это позволило получить идеальный блик и объем в каждом конкретном кадре.
Как это выглядит в VR
В этом видео показана работа базовых механик взаимодействия и логика симулятора на стадии прототипа (до этапа финальной полировки графики).
Главный итог проекта
• Успешно собран Proof of Concept. Главная цель достигнута — мы на практике доказали способность команды собирать VR-тренажеры с рабочими механиками и интерактивом.
• Работа с дедлайнами. Проект сдан вовремя благодаря грамотному подходу к урезанию функционала. Мы сознательно отказались от некоторых деталей ради стабильности базовых механик.
Чему научился и какие выводы сделал
• Гибкость в принятии решений. Столкнувшись с проблемой "улетающих" вертексов на риге гидравлических шлангов перед самой сдачей, принял решение временно отключить этот элемент. Это спасло демо-версию от критических багов.
• Тестирование гипотез UX. Провел тесты на людях без опыта в VR. Экспериментировали с настройками комфорта и перемещения (в частности, тестировали движение без виньетки), чтобы отследить реакцию вестибулярного аппарата новичков. Слегка увеличили скорость работы манипуляторов, чтобы избавить от долгого ожидания, сделать процесс управления более отзывчивым и сохранить динамику работы.
• Специфика мобильного VR. Получил понимание ограничений при разработке под автономные шлемы (Pico) и выявил узкие места, требующие оптимизации в будущих сборках.
Roadmap и зоны роста тренажера
Проект имеет отличный потенциал для масштабирования. В случае запроса на полноценный продакшн, план доработок следующий
• Проработка кабины ГАЗ 3308. Замена базовой текстуры приборной панели на полноценную 3D-модель, внедрение интерактивных дверей, ручки КПП, педалей и тумблеров.
• Доработка подкапотного пространства.
• Доработка сложных анимаций, возможно добавление инерции в движения манипулятора. Настройка корректного скиннинга и физики для гибких элементов (возврат гидравлических шлангов).
• Улучшение визуала под Standalone VR. Запекание освещения и Ambient Occlusion (AO) для придания картинке реалистичного объема без дополнительной нагрузки на процессор шлема.